
Propagación usando aviones

Pagina original para poder usar las ligas: http://www.nitehawk.com/w3sz/AircraftScatter.htm
Los radioaficionados utilizan la dispersión o la reflexión de las señales de radio de los objetos en el cielo para aumentar el alcance de las comunicaciones, ya sea que realicen Meteor Scatter, EME, Aurora, E esporádica u otros modos de comunicación.
La aeronave también se puede usar para aumentar el alcance de las comunicaciones mediante el uso de Aircraft Scatter. Me interesé mucho más en Aircraft Scatter cuando supe que Rex Moncur VK7MO y David Smith VK3HZ completaron contactos de dispersión de aeronaves de hasta 842 km en 10 GHz y 462 km en 24 GHz. Su documento que describe estos logros está aquí .
Un artículo sobre este tema que escribí en 2014 está aquí . Contiene algo de la historia y la teoría de Aircraft Scatter, así como algunas discusiones sobre mi software AircraftScatter Sharp. Si está interesado en Aircraft Scatter y quiere saber más después de leer esta página, es un buen lugar para comenzar. Un documento de seguimiento más detallado que escribí en la primavera de 2017 y que se presentó en la Conferencia del Grupo NEWS está aquí
Si está buscando información sobre mi software AircraftScatter Sharp, puede descargar un instalador para el programa aquí , y más información sobre el programa está aquí
Esta página está dividida en las siguientes secciones:
Software para ayudar con las operaciones de dispersión de aeronaves
Teoría de dispersión de aeronaves: la ecuación del radar biestático y más
Cómo empezar
Recepción de aviones locales sobre el aire
Fuentes de información sobre la recepción directa de señales ADS-B
Excelentes fuentes de información de dispersión de aeronaves en la Web
Una versión anterior de esta página está aquí .
Software para ayudar con las operaciones de dispersión de aeronaves:
Para hacer un trabajo de dispersión de aeronaves, necesitas saber dónde están los aviones.
Hay dos formas de determinar dónde están los aviones en cualquier momento. El primero es recibir esa información usted mismo por el aire, y la segunda forma es obtener esa información de los servidores de Internet. Ambos métodos se basan en el hecho de que prácticamente todas las aeronaves ahora transmiten regularmente información sobre su identidad y posición.
Las dos tecnologías de uso común son Modo S y ADS-B. Los transpondedores en modo S de transporte de aeronaves responderán a un interrogatorio desde una estación terrestre mediante el envío de un paquete de información. Las aeronaves en Modo S también pueden enviar paquetes no solicitados llamados squitters. El sistema ADS-B o Automatic Dependent Surveillance-Broadcast envía paquetes no solicitados. Con ambos sistemas, las aeronaves envían sus señales de datos a 1090 MHz. Ya sea que reciba su información por aire o a través de Internet, se originó con uno de estos sistemas.
Hay varios servidores que puedes usar. Inicialmente utilicé PlanePlotter, porque el software de dispersión de aeronaves de primera generación que escribí hace varios años funcionaba a través de PlanePlotter para obtener sus datos. Hay una descripción de este programa mio antiguo en una de mis páginas web . No pierdas el tiempo aprendiendo los detalles desordenados de cómo configurar ese programa con PlanePlotter, sin embargo, porque desde entonces he escrito un programa más nuevo que se conecta directamente a los servidores en la web y no requiere PlanePlotter ni ningún otro programa para función.
El programa más nuevo se llama Aircraft Scatter Sharp y tiene varias capacidades importantes:
- Captura y visualización de la información de la posición del avión en tiempo real para aviones capturados por servidores de Internet, o por un receptor / servidor RTL1090 en Modo S local que está ejecutando en su red local, o ambos al mismo tiempo.
- Visualización de la línea de ruta directa entre dos estaciones, junto con líneas oblicuas para permitir una evaluación rápida de la desviación angular de la posición de una aeronave desde la línea de ruta directa para ambas estaciones, y un círculo de punto medio para mostrar cuando una aeronave está dentro de una distancia especificada desde el punto medio de la ruta. También se muestran los perfiles de altura de camino y elevación / obstrucción.
- Resaltar las aeronaves cerca de la posición ideal para la reflexión, basadas tanto en la distancia desde el punto medio de la ruta como en la desviación angular de la ruta.
- Cálculo en tiempo real de la pérdida de trayecto / intensidad de señal recibida / margen de señal para comunicaciones de dispersión de aeronaves utilizando el plano seleccionado, en función de la ubicación del avión y los parámetros de estación ajustables por el usuario para las estaciones en ambos extremos de la ruta directa (frecuencia, potencia de transmisión , cifra de ruido del receptor, ancho de banda de recepción y ganancia de antena).
- Una base de datos SQLite integrada que le permite guardar información en todos los planos que aparecen en la pantalla durante el tiempo que desee [minutos, horas, días, semanas, meses] y luego analizar esos datos para determinar cuándo es más probable que haya oportunidades de dispersión de aeronaves aparecer en el futuro Puede analizar los datos sin interrumpir su recopilación, y las poderosas funciones de búsqueda SQL se incluyen automáticamente y se pueden seleccionar fácilmente utilizando solo clics de ratón para generar las sentencias de consulta SQL.
La última pieza, la base de datos SQL, proporciona lo que ha faltado en el software anterior de dispersión de aeronaves (a excepción de mi programa anterior mencionado anteriormente, que también incluía esta característica). Para EME tenemos predictores de software de cuándo la luna estará «disponible» para usar como reflector. Para rain-scatter tenemos RainScatter, de Andy Flowers, K0SM para darnos esta información. Pero no ha habido nada similar para la dispersión de aeronaves hasta ahora, y que yo sepa, nada más que este programa.
Un artículo que trata sobre mi programa, Aircraft Scatter Sharp, está aquí. Dará muchos más detalles sobre Aircraft Scatter Sharp y te ayudará a comenzar. Debes leer esto. Hay demasiadas características de este programa para enumerarlas aquí en esta página web.
En la parte superior de esta página web hay una captura de pantalla de Aircraft Scatter Sharp. Puede descargar un archivo de instalación para el programa aquí . Simplemente haga doble clic en «Setup.exe» para instalar. El programa ha sido probado y funciona con las versiones de 32 y 64 bits de Windows 7 y con Windows 8.1 (64 bit) y Windows 10 (64 bit). No se ha probado con otros sistemas operativos y NO funcionará con Windows XP y versiones anteriores de Windows. A continuación se muestra una captura de pantalla del programa que muestra los datos del plano de los planos obtenidos de mi propio receptor en Modo S basado en RTL1090:
Teoría de dispersión de aeronaves: la ecuación del radar biestático y más
La dispersión de aviones NO es mágica. Aún necesita considerar las ecuaciones de pérdida de trayectoria y, además, las características reflectantes menos que perfectas de la aeronave. El avión te brinda una superficie reflectante (imperfecta) que se coloca en lo alto del cielo, lo que te permite extender tu horizonte. Pero si tiene una señal insuficiente para compensar las pérdidas de ruta, incluidas las pérdidas sufridas por la reflexión imperfecta de la aeronave, no podrá escuchar la otra estación ni establecer contacto. La ecuación de radar se puede usar para determinar si un contacto puede completarse o no; relaciona la potencia del receptor con la potencia del transmisor, teniendo en cuenta las pérdidas de ruta y las características del sistema. Emil Pocock W3EP escribió una agradable discusión de esto aplicado a la dispersión de aviones de radioaficionados en el Manual de ARRL UHF / Microondas Experimentador, páginas 3-28 y 3-29. Él reformó la ecuación en términos de pérdida de ruta:
pérdida total (en dB) L = 10 log ((lambda ** 2) * S / (((Rt) ** 2) * (Rr) ** 2))) – 153 donde
Rt = distancia del transmisor al reflector en km
Rr = distancia del receptor al reflector en km
lambda = longitud de onda en metros
S = sección transversal del radar de la aeronave
«S», la sección transversal del radar del avión, obviamente dependerá del aspecto que el avión presente al observador, y también puede tener una dependencia de frecuencia si se usan ciertos materiales. Emil dio valores estimados de 2 M ** 2 para un Lear Jet, 8 para un Douglas DC-9, 16 para un Boeing 707 y 63 para un Boeing 747.
Si usamos esta ecuación para evaluar la pérdida de trayectoria para un avión del tamaño Boeing 707 para 10 GHz, trabajamos con el avión en el punto medio entre dos estaciones a 500 km de distancia, obtenemos una pérdida de ruta de 267 dB. En comparación, la pérdida de trayecto EME para 10 GHz en perigeo sería de 287 dB. La pérdida de trayecto superior a 500 metros en el espacio libre sería de 167 dB. Por lo tanto, la dispersión de la aeronave pierde 100 dB adicionales en relación con la pérdida de espacio libre, y más de 500 kM de recorrido es solo 20 dB mejor que el rebote lunar. Si estuviera utilizando un plato de 30 pulgadas y un transmisor de 4 vatios y tuviera una sensibilidad de recepción de -130 dBm, entonces en un espacio libre de 500 km tendría un margen de fundido de 71.2 dB. Con la dispersión de la aeronave, estaría 29 dB por debajo del ruido. Por lo tanto, parece que la dispersión de aeronaves es útil solo si tiene un ERP alto y un receptor sensible. Con las mismas características de receptor pero con 100 vatios de potencia de transmisión y un plato de 3 metros, su margen de desvanecimiento para una ruta de 500 km en el espacio libre sería de 109 dB. Entonces, para la dispersión de la aeronave, estarías 9dB fuera del ruido y podrías hacer un contacto CW. Tenga en cuenta que VK7MO y VK3HZ pudieron hacer contactos usando solo 10 vatios y un plato de 34 dBi en un extremo y 8 vatios y un plato de 32 dBi en el otro extremo de un camino de 628 km, pero usaron JT65C para obtener ganancia de recepción adicional. Para 5 GHz, la pérdida de trayecto para la misma trayectoria de dispersión de la aeronave sería de 261 dB en lugar de 267 dB. Puedes verificar los cálculos si lo deseas usando 6.25E11 metros para la sección transversal del radar de la luna y 356,000 km como perigeo, y resolver la ecuación del radar para la pérdida de trayectoria con la luna como reflector. Obtendrá 281 dB. Como se señaló anteriormente, mi programa hará cálculos de pérdida de ruta para la estación DX seleccionada y el avión de su elección. Se puede encontrar más información sobre esto en un archivo pdf acompañante , que comienza en la página 12, y también en el documento más reciente de 2017, aquí . Aquí hay una captura de pantalla de la ruta EN90gg <> FN20ag que uso para la ilustración: con los parámetros elegidos, las señales son aproximadamente 11 dB del ruido. Puede ver la ruta y la aeronave designada en el mapa Sharp de la dispersión de la aeronave, y los parámetros de intensidad de la señal en la parte de la forma de la Calculadora de pérdida de trayectoria.
{kind=link}
Sin embargo, hay algo de MAGIA potencial que puede surgir: 20-30 dB o más de mejora de la señal puede ocurrir cuando la aeronave está ubicada en la línea de ruta directa entre las dos estaciones o muy cerca de esta. Esta mejora se denomina mejora de «dispersión frontal» y se reduce extremadamente rápido si la aeronave se encuentra incluso ligeramente fuera de esta línea. Rex Moncur VK7MO tiene un excelente trabajo discutiendo esto aquí , y VK2KU Guy Fletcher lo discutió también en el documento aquí . Esta mejora también depende de la frecuencia, como se señala en los documentos anteriores, y es probable que tenga una utilidad reducida a 10 GHz y superior, debido a los lóbulos muy estrechos de la dispersión producidos a esta frecuencia más alta. VK7MO y David Smith, VK3HZ discuten esto aquí . Tenga en cuenta que Rex y David pudieron utilizar este fenómeno tanto en 10 como en 24 GHz, a pesar de las restricciones de frecuencia mencionadas anteriormente. Usando un «nuevo» modo WSJT llamado ISCAT-A para aviones de 10 y 24 GHz Scatter, Rex y David han completado contactos de dispersión de aeronaves de hasta 842 km en 10 GHz y 462 km en 24 GHz. Su documento que describe estos logros está aquí . Rex describe este nuevo modo así:
«Este modo es alrededor de 15 dB más sensible que FSK441 y es un desarrollo posterior de ISCAT que se incluye en la versión de WSJT9 publicada públicamente. La nueva versión incluye ISCAT-A e ISCAT-B con ISCAT-B siendo el antiguo ISCAT incluido en la versión públicamente disponible. Joe Taylor desarrolló amablemente ISCAT-A para cumplir con nuestros requisitos para la dispersión de aeronaves a 10 GHz. Puede ejecutarse en períodos de 15 segundos y puede hacer frente a variaciones Doppler muy rápidas de hasta 1000 Hz / min como ocurre en 10 GHz cuando una aeronave cruza la ruta en ángulo recto. También hace frente a los estallidos cortos de unos pocos segundos que recibimos a 10 GHz y tiene una función de promediado que le permite aprovechar ráfagas más largas pero más débiles «.
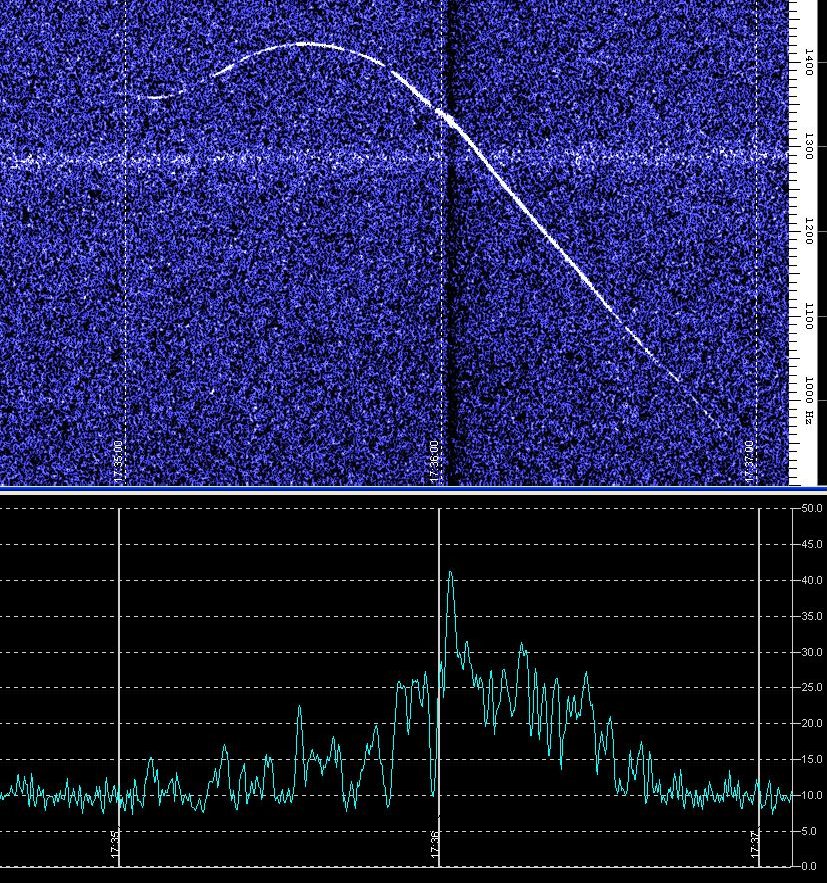
Rex tuvo la amabilidad de enviarme algunas tramas de mejora de dispersión hacia delante, ya que se produjo en el camino de 561 km entre su QTH y la de VK3GHZ. El gráfico superior es un diagrama de frecuencia de cascada frente al tiempo y el gráfico inferior muestra la intensidad de señal frente al tiempo. ¡Usted puede ver que la señal de Dispersión de Aviones alcanza un máximo de 30 dB por encima del ruido en este camino de 561 km!
Rex describe además estos gráficos de la siguiente manera: es posible que le interese la imagen adjunta de la dispersión de la aeronave en 10 GHz en una ruta de 561 km hacia VK3GHZ. La parte superior es la visualización de la frecuencia de cascada y la inferior es la visualización de la amplitud y el tiempo. El avión está cruzando a aproximadamente 20 grados. Esto se produce al ejecutar un tono a 1270 Hz y ver el resultado en el otro extremo en Spectrum Lab. Resulta que puedo transmitir a VK3GHZ desde el interior de mi salón y él puede trabajar desde el interior de su garaje para que podamos dejar nuestros sistemas instalados y no preocuparnos por la lluvia. Puede ver una tropo-scatter débil que se propaga a alrededor de 1290 Hz (una frecuencia levemente inferior debido a que el IF de VK3GHZ no está bloqueado por GPS). La señal del avión tiene un pico de amplitud justo antes de que cruce el camino, como se ve por el ruido que se reduce a medida que el AGC entra en juego. El punto de cruce debe ser donde el Doppler es cero según lo define la señal tropo. Creo que el pequeño error se debe a que estamos tratando con Doppler en los planos horizontal y vertical y el componente vertical causa el pequeño desplazamiento. Verá que la señal alcanzó un máximo de más de 40 dB en un ancho de banda de 1,6 Hz; esto es equivalente a aproximadamente +7 dB en la escala WSJT, pero solo duró en este nivel durante aproximadamente un segundo más o menos. Hay una serie de otros picos en más de 20 dB o -13 dB en la escala WSJT. Todos estos se decodificarán fácilmente en ISCAT-A. Todo el proceso dura 2 minutos, lo que es suficiente para completar un QSO en ISCAT establecido durante 15 segundos. Hasta la fecha, hemos completado dos QSO de esta manera.
Cómo empezar:
- Lee mi artículo pdf aquí .
- Descargue e instale usando el archivo Aircraft Scatter Sharp . Simplemente haga doble clic en el archivo .exe para comenzar la instalación. El programa ha sido probado y funciona con las versiones de 32 y 64 bits de Windows 7 y Windows 8.1 y Windows 10. No se ha probado con otros sistemas operativos y NO funcionará con Windows XP o versiones anteriores del sistema operativo Windows. . Más información sobre el programa está aquí
- Obtenga WSJT o WSJT-X para que pueda ejecutar ISCAT-A y use periodos de 15 segundos (o pruebe uno de los otros modos más nuevos como se describe en mi documento al que se hace referencia arriba).
- Encuentra una estación DX que también esté interesada
- Si se encuentra en un área donde frecuentemente hay aviones que pasan cerca del punto medio de su camino previsto a una altitud suficiente para ser visto por ambos socios de QSO, simplemente active Aircraft Scatter Sharp, salga al aire y átelo.
- Si se encuentra en un área donde los aviones colocados fortuitamente son menos frecuentes, use mi programa Aircraft Scatter Sharp para construir una base de datos de cuando los aviones están realmente en posiciones adecuadas, o elimine los horarios de vuelo, o use un sitio como http : //flightaware.com/live/ donde puede escribir en las ciudades de origen y destino, obtener una lista de todos los vuelos y determinar los tiempos favorables para los intentos de contactos. Los datos de FlightAware le dan una idea de cuándo los aviones «podrían» estar donde usted quiere que estén. La información recopilada durante un período de días o semanas utilizando mi programa Aircraft Scatter Sharp le brinda datos reales sobre cuándo realmente había aviones en las ubicaciones que necesita. Créalo o no, ¡los horarios de las aerolíneas no son consistentes día a día! Los tiempos programados pueden ser consistentes, pero los tiempos de vuelo reales no lo son. Por lo tanto, tener datos reales guardados por Aircraft Scatter Sharp en una base de datos SQL puede ser muy útil para planificar sesiones operativas.
- Use la Calculadora de pérdida de trayectoria de mi programa (o haga los cálculos) para calcular el presupuesto del enlace y determinar la probabilidad de éxito con y sin mejora de la dispersión directa, utilizando los valores apropiados para la potencia de transmisión, ganancia de antena y ruido del receptor. figura.
- Pruébalo usando Aircraft Scatter Sharp e ISCAT-A, a veces como se indicó anteriormente. Con Aircraft Scatter Sharp funcionando, puede ver cómo se ven las cosas segundo a segundo, y también ver si las nuevas aeronaves entran en posiciones favorables para la dispersión.
Recepción de aviones locales sobre el aire
Hay una cantidad de receptores disponibles para permitirle recibir estas señales directamente por el aire. Estos incluyen el Kinetic-Avionic SBS3, AirNav Systems Radar Box, el receptor microADSB, el Aurora Virtual Radar Mode S Receiver y el Mode-S Beast18, que fue diseñado por DL4MEA y se considera el mejor receptor disponible de 1090 MHz. Cada uno de estos tiene un sitio web fácil de encontrar y lleno de información.
O bien, puede ahorrar algo de dinero y utilizar como receptor un Dongle RTL2382 barato que puede obtenerse por $ 20 o menos. Eso es lo que hice, obteniendo un «Receptor NooElec TV28T v2 USB DVB-T y RTL-SDR» de Amazon por $ 19.95 con envío gratis. Luego fui al sitio web http://rtl1090.web99.de/ (ahora http://rtl1090.com) donde descargué el software RTL1090 y los controladores (NO instales los controladores que vienen con este dispositivo si quieres usar para la dispersión de aviones!). Este sitio también tiene un excelente manual de instrucciones para comenzar a funcionar con un dongle RTL2382. Desea ejecutar el software RTL1090 en modo «Modo S».
Creo que la manera más fácil y económica de comenzar a recibir aviones locales , si quieres hacer eso en lugar de (o además de) usar los datos de Internet es conseguir uno de los Dongles RTL 2832 baratos de Amazon , como lo hice y como es descrito arriba.
Una buena URL para obtener software y orientación para comenzar en Windows es http://rtl1090.com
Comencé con el software RTL1090 descargado de rtl1090.com, pero posteriormente cambié a Dump1090 porque tiene un decodificador ADS-B mucho mejor que el software RTL1090. Dump1090 se puede descargar desde aquí . Puede utilizar cualquiera de estos programas para alimentar Aircraft Scatter Sharp, PlaneFinder , PlanePlotter o FlightRadar24 .
Aunque obtuve buenos resultados simplemente usando la pequeña antena interior de 4 pulgadas que viene con el dongle, obtengo mejores resultados con una antena exterior y un preamplificador montados en la antena. Actualmente tengo una antena WIMO GP-1090 y un preamplificador de montaje en mástil Kuhne 1090 MHz y obtengo un excelente rendimiento de ellos, como pueden ver aquí . Aquí en FN20ag tengo obstrucciones significativas, y encuentro que mi rango típico con el dongle NooElec es el siguiente:
{kind=link}
NW 410 km
N 310 km
E 180 km
S 370 km
SW 200 km
No puede esperar un rendimiento óptimo a 1.09 GHz sin un preamplificador montado en el mástil y un cable coaxial de baja pérdida, a menos que su dongle esté justo en la antena. Además, los dongles son extremadamente anchos de banda por diseño, y tienen una tolerancia de señal muy pobre. Por lo tanto, el uso de una antena con cierta selectividad de frecuencia y un preamplificador con filtros helicoidales u otros para eliminar las señales que están fuera de la banda de paso deseada mejorará en gran medida el rendimiento al evitar la degradación del receptor causada por señales fuertes fuera de banda. Así que incluso si tiene el dongle justo en la antena, agregar un preamplificador con selectividad de frecuencia mejorará el rendimiento al atenuar las señales fuera de banda antes de que lleguen al dongle.
Hay más información para ayudarlo a configurar un dongle RTL como un receptor ADS-B en: http://www.rtl-sdr.com/adsb-aircraft-radar-with-rtl-sdr/
También puedes jugar con el dongle RTL en Linux. Hice mi instalación original del E4000 en Linux, pero luego ejecuté el dongle RTL en Windows hasta que la computadora Windows que estaba usando con el dongle RTL murió. En ese momento , decidí usar un Black Beaglebone que tenía sentado con mi dongle RTL y Dump1090. Ya estaba al tanto de algunas instrucciones muy buenas para usar el dongle RTL con Raspberry Pi, y solo se necesitaban modificaciones mínimas a esas instrucciones para hacer funcionar el dongle RTL con Beaglebone Black. Puede descargar un archivo pdf de los pasos que he usado desde aquí .
La URL que utilicé originalmente para ayudarme a configurar el dongle RTL con Linux hace varios años lo guiará a través de la configuración del dongle RTL con Linux paso a paso. Este enfoque es más complicado que el enfoque que usa Dump1090 que describí anteriormente. El enlace para esta URL es: http://www.hamradioscience.com/the-rtl-2832u-sdr-and-ads-b/ . Aunque inicialmente seguí este enfoque e instalé gnuradio, la aplicación gr-air-modes y el programa de servidor VirtualRadar en mi caja Linux y luego lancé gr-air-modes y luego Virtual Radar para que el servidor VirtualRadar comenzara a enviar datos a PlanePlotter corriendo en mi caja de Windows, me resultó mucho más simple instalar Dump1090 en mi Beaglebone Black y hacer que el servidor plano incorporado de Dump1090 envíe sus datos a PlanePlotter.
He disfrutado jugando con mi propio servidor plano de dongle RTL, y tener un servidor de este tipo agrega significativamente a los datos recibidos en Internet. Como ejemplo, actualmente estoy recibiendo en mi campo de visión aproximadamente desde aviones FN20ag a FN23xc 163 desde el servidor de aeronaves de Internet que estoy usando y 299 aviones desde mi dongle RTL, de los cuales 210 son únicos y 89 son redundantes ya que son también se incluye en los datos descargados del servidor de aviones de Internet. También cargo mis datos de aviones en tiempo real desde mi dongle RTL al servidor de plano de internet PlanePlotter para que otros los usen. He cargado aproximadamente 136 millones de posiciones de aviones en ese servidor desde el momento en que escribo esto.
A continuación se muestra una captura de pantalla de la antigua instalación de RTL de «Virtual Radar» que se ejecuta en mi caja de Linux. Nuevamente, puede ver una versión más grande haciendo clic derecho en la imagen y luego haciendo clic en «Ver imagen»:

A continuación se muestra un gráfico de los ángulos de elevación frente a la distancia de los aviones que he seguido aquí con PlanePlotter. Solo los aviones muy cercanos tendrán una elevación de más de 2 grados o más, por lo que no es necesario tener control de elevación a menos que el ancho de haz de la antena sea muy estrecho:

Fuentes de información sobre la recepción directa de señales ADS-B
DL4MEA tiene una página web que describe un receptor / decodificador mucho más sofisticado que diseñó en: http://www.qsl.net/dl4mea/fpgaadsb/fpgaadsb.htm . Este dispositivo conocido como «Mode-S Beast» se describe con más detalle y está a la venta en: http://www.modesbeast.com/ .
Una descripción técnica del sistema ADS-B está en:
www.ll.mit.edu/mission/aviation/publications/publication-files/journal-articles/Orlando_1989_JA-6373.pdf Las referencias adicionales están en la sección de referencias al final de mi artículo mencionado anteriormente .
Las transmisiones ADS-B usan la codificación de Manchester, que se describe en:
http://en.wikipedia.org/wiki/Manchester_code
Excelentes fuentes de información de dispersión de aeronaves en la web:
Hay algunas páginas excelentes que analizan varios aspectos del uso de Aircraft Scatter para fines de radioaficionados:
VK3HZ y VK7MO tienen excelentes páginas web y artículos sobre el trabajo de Aircraft Scatter que han hecho. Han realizado una investigación exhaustiva y han realizado contactos de dispersión de aeronaves en frecuencias de microondas de hasta 24 GHz, utilizando JT65C e ISCAT (un nuevo modo WSJT). Han completado contactos de dispersión de aeronaves de hasta 842 km en 10 GHz y 462 km en 24 GHz. Hacen un uso extensivo del sistema ADS-B y del software PlanePlotter. Me complació ver su gran éxito y logros con estas técnicas … valida mis planes y me dice que estoy en el camino correcto con mis primeros esfuerzos aquí. ¡Especialmente desea consultar las secciones de sus páginas web denominadas «Pruebas de propagación de 24 GHz», «Visualización de sitio de radio» y «Propagación mejorada de aeronave»! :
http://www.vk3hz.net/
El desplazamiento Doppler exacto visto con la dispersión de la aeronave para una situación dada dependerá de la geometría. Ron Cook VK3AFW, Rex Moncur VK7MO y David Smith VK3HZ tienen un buen artículo sobre esto en: http://www.vk3hz.net/microwave/Doppler-Shift-Estimation-10GHz-AE.pdf .
Esta página de VK3HZ ofrece enlaces a muchas otras páginas de Scatter de aviones de Down Under:
http://www.vk3hz.net/ae.htm
La página de dispersión de los aviones de SM6FHZ:
http://www.2ingandlin.se/ACS.htm Tiene aquí una hoja de cálculo Excel de pérdida de trayectoria de dispersión de aviones.
SM0DFP tiene una página que describe su uso de señales ADS-B para ayudar con los contactos de dispersión del avión:
http://sk0ct.se/propagation/flygscatter1.htm
Aquí hay una bonita página sobre la dispersión de aviones de GM4XCM:
http://www.rayjames.biz/gm4cxm/id28.html
Aquí hay una página interesante sobre la dispersión de aviones por G0ISW:
http://www.qsl.net/g0isw/g0iswair.htm
SM0LCB tiene una superposición para GoogleMaps para ayudarlo a planificar contactos:
http://sk3w.se/sm7lcb/www-sm7lcb/maps/qso_map/pathmap2.htm . Consulte también la parte inferior de esta página web para obtener más información: http://sk3w.se/sm7lcb/www-sm7lcb/maps/qso_map/index.htm A continuación se muestra una imagen de su página de GoogleMaps que muestra una posible ruta de dispersión de aeronaves entre mi ubicación y EN90gg . Esta información de ruta directa se incluye en la información proporcionada por mi programa Aircraft Scatter Sharp descrito anteriormente.

Una charla en PowerPoint de DF9IC sobre la dispersión de aviones:
http://www.df9ic.de/doc/2006/sletten_2006/sletten06_airplane_reflection.ppt
El sistema ADS-B (modo de vigilancia de dependencia automática-transmisión) está descrito por AE5X:
http://www.ae5x.com/blog/2010/01/18/ads-b-aviations-aprs/
Hay un buen programa de Aircraft Scatter llamado AirScout por Frank, DL2ALF que utiliza datos de aviones que están disponibles en la web. Se ejecuta en Windows. Puede leer sobre esto aquí y descargarlo desde aquí . Aquí hay una captura de pantalla de su programa que se ejecuta aquí en W3SZ:

Esta es la pagina original para aprovechar todas las ligas de la misma: Click aqui : http://www.nitehawk.com/w3sz/AircraftScatter.htm
y de Wikipedia:
Dispersión de avión
Saltar a la navegación Saltar a la búsqueda
La dispersión del avión (o más a menudo la reflexión) se observa en las ondas de radio de alta frecuencia a VHF a través de microondas [1] y, además de la retrodispersión, produce una propagación momentánea de hasta 800 km incluso en terreno montañoso. Las aplicaciones de retrodispersión más comunes son el radar de tráfico aéreo , el misil teledirigido biestático de dispersión directa y el radar de disparo de detección de aeroplano, y el radar espacial estadounidense.
También es un modo de propagación menos común utilizado por radioaficionados .
Historia
La dispersión del avión se había descubierto en 1930, pero el uso de radioaficionados se retrasó hasta finales de los 80. El advenimiento de un seguimiento de vuelo en tiempo real barato y basado en SDR permitió una programación precisa, aumentando la viabilidad. [2] [3]
Uso de radio aficionado
En comparación con un único rastro de dispersión de meteoritos , el tiempo de apertura causado por un solo avión es más largo, puede ser de 30 segundos hasta unos minutos. A veces se puede encontrar una ligera asimetría tanto en términos del tiempo exacto como de la ganancia del camino.
El alcance y las posibles longitudes de contacto se ven afectados por el tamaño del avión, el nivel de vuelo y el tiempo aproximado de cruce de la parte central de la línea recta entre las dos estaciones de comunicación. [4]
Tanto el inicio como la disminución del canal son rápidos, por lo que para mejorar la tasa de éxito, se utiliza un procedimiento de contacto corto. [5]
Las oportunidades de contacto pueden predecirse en función de las rutas de vuelo precisas de los aviones circundantes. Existen soluciones de software para predicción utilizando fuentes locales ( Modo S y ADS-B ) o en línea. [6] [7]
El acceso a microondas con antenas de alta ganancia necesita considerar una orientación precisa que también tenga en cuenta los ángulos de elevación.